Selected work
Representative engagements
A cross-section of the kind of work we do across inspection, mobile robots, manipulation, assembly, additive, and precision integration. The examples below are illustrative of our capabilities, not named client deliverables. We will share specific references on request.
Surface defect detection on a stamping line
Inline detection of surface defects on stamped panels, inside the existing press cycle.

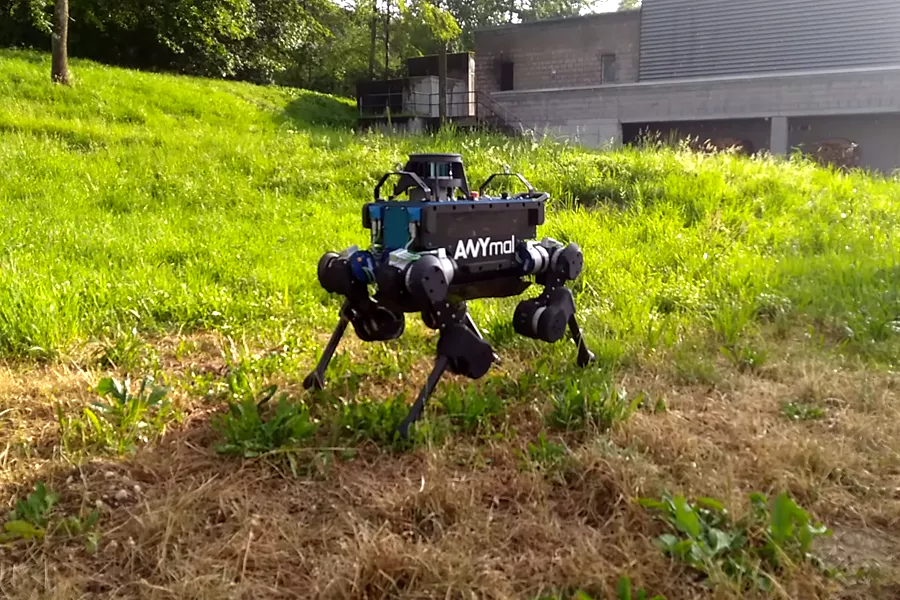
Perception and navigation for mixed-traffic AMRs
Localisation and obstacle handling for autonomous robots sharing aisles with people and forklifts.
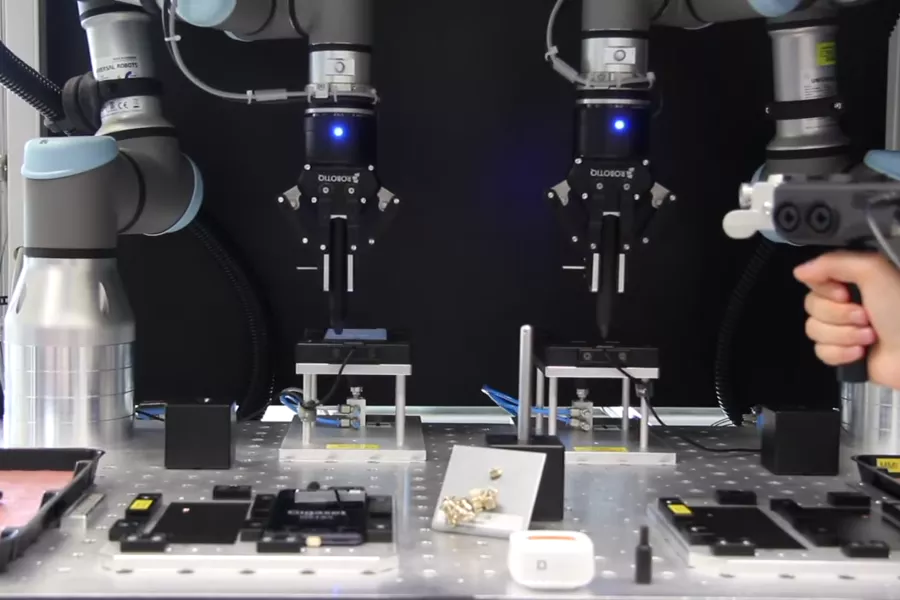
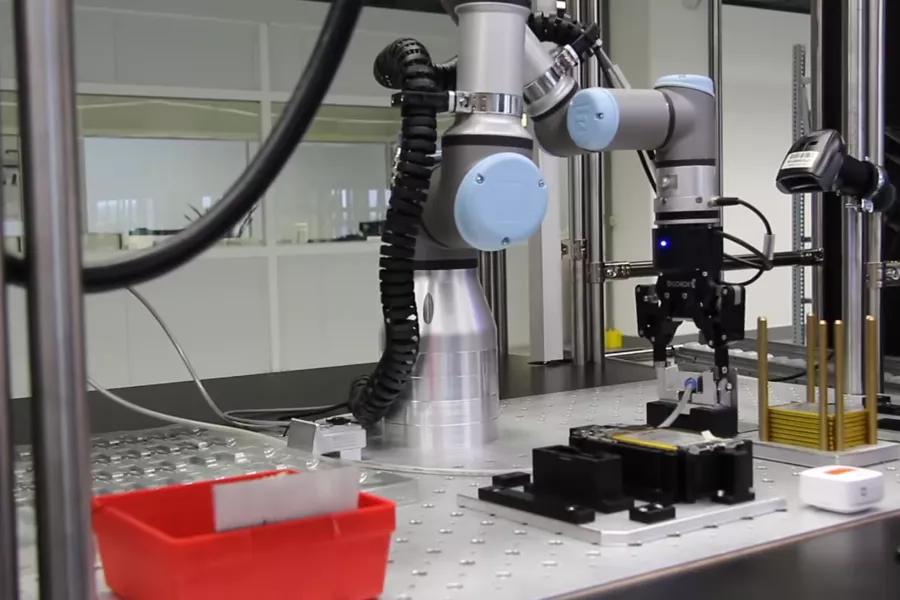
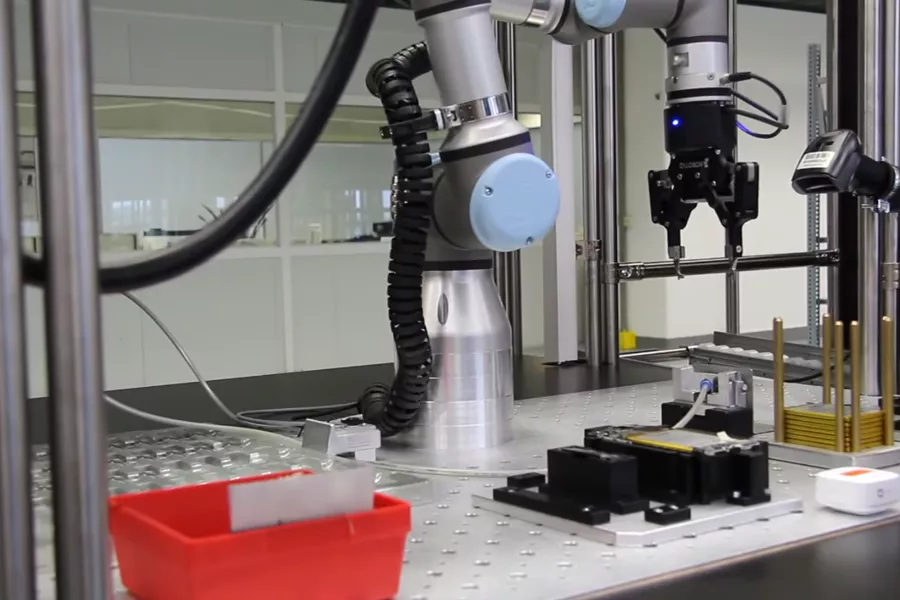
Bin picking with 3D grasp estimation
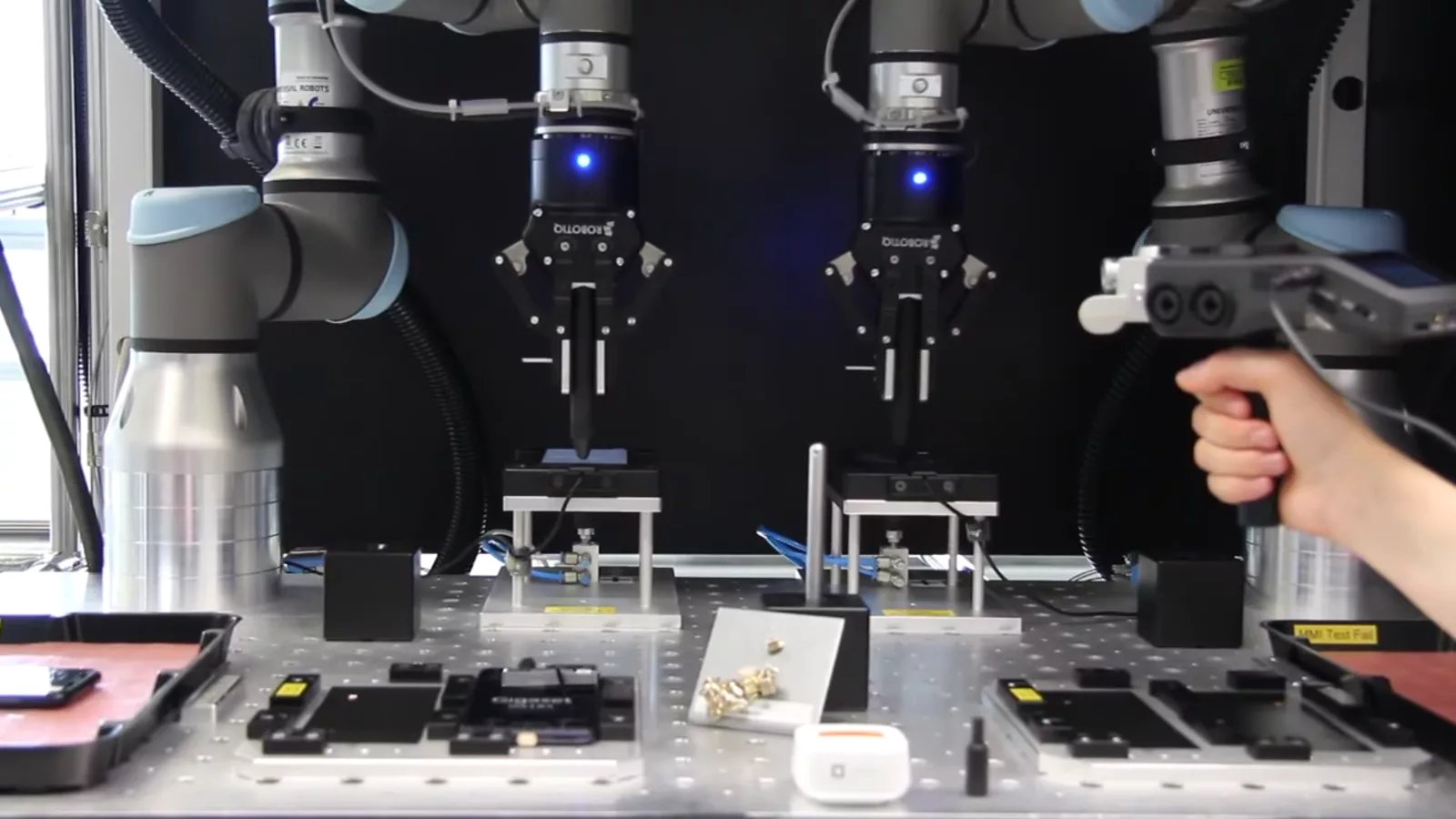
A robotic arm picking mixed metal parts from unsorted bins to tend a machining cell.
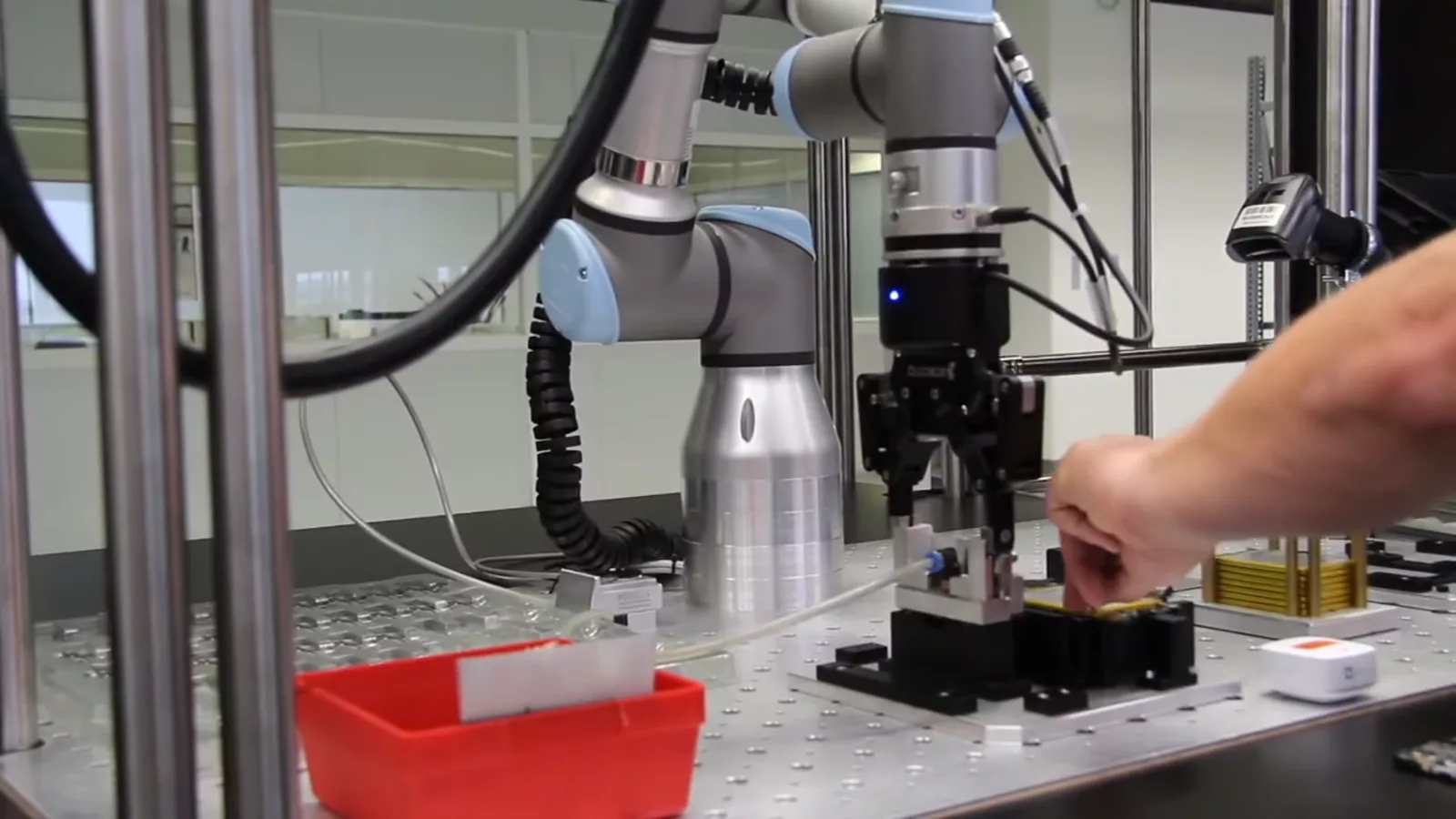
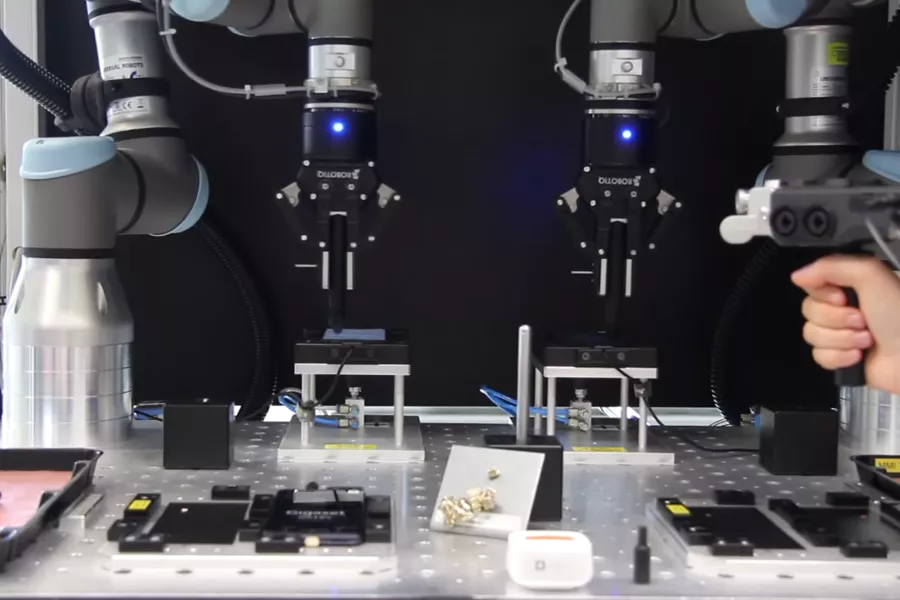
Vision guidance and verification on an assembly cell
Part guidance and inline verification on a mixed-model manual assembly station, inside takt.
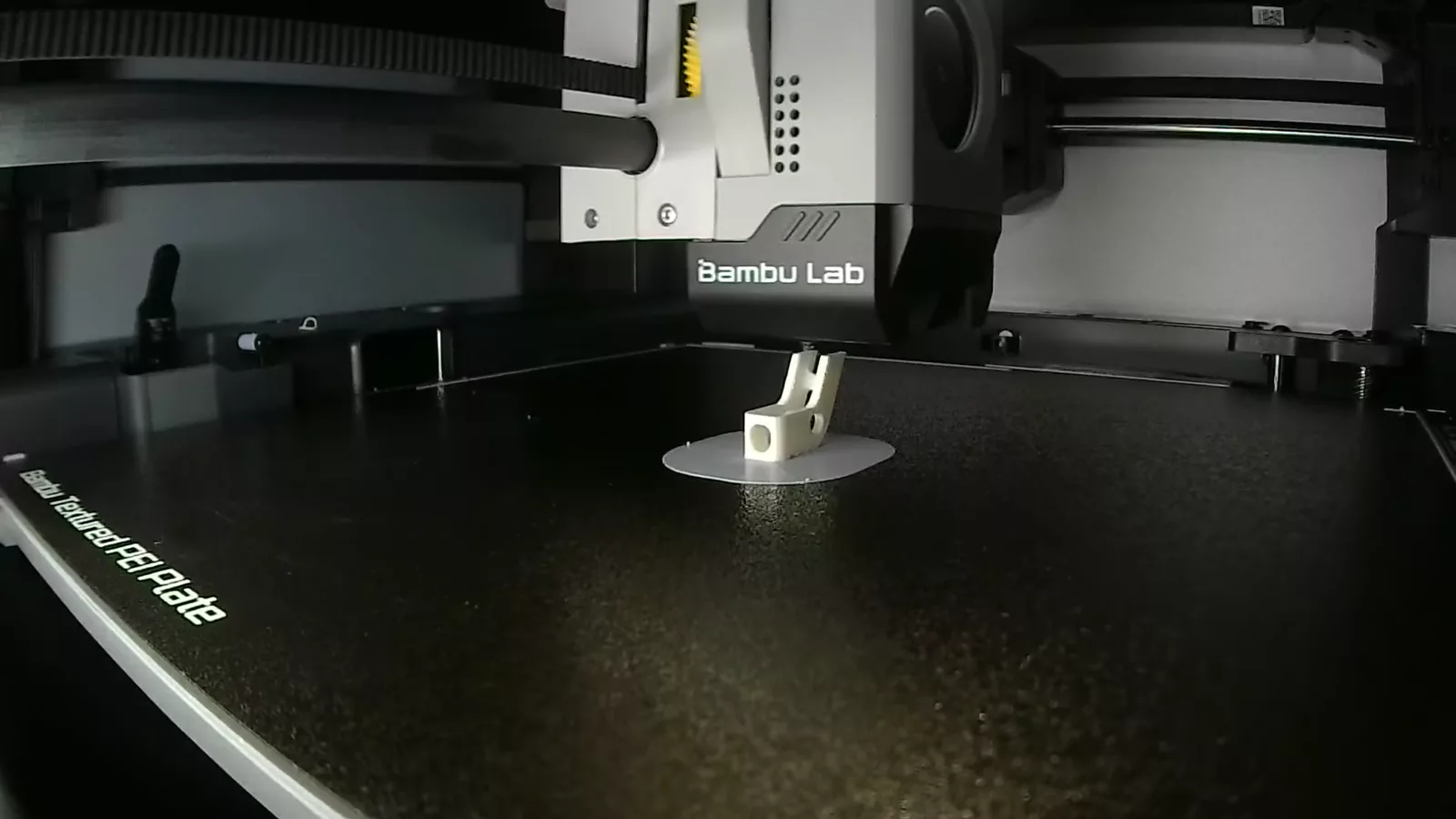
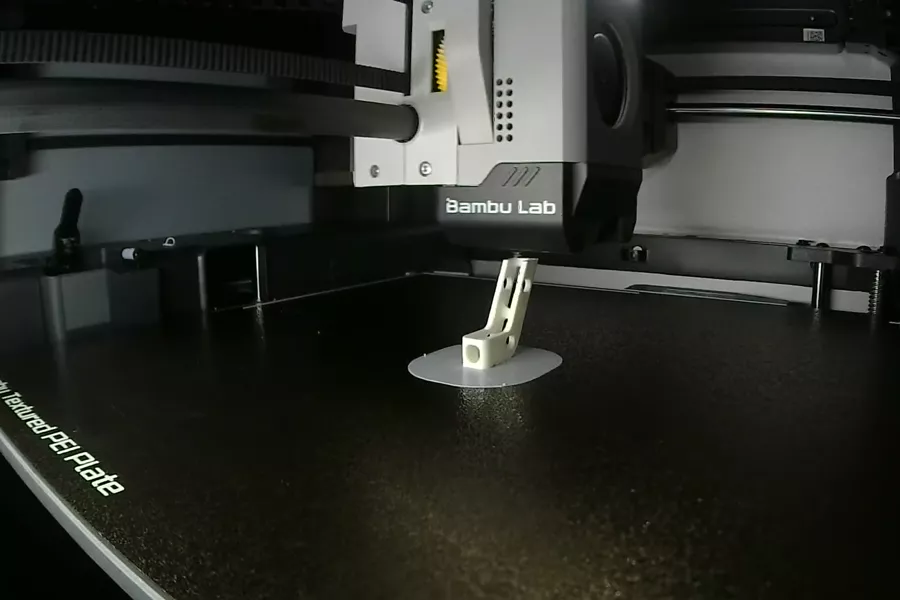
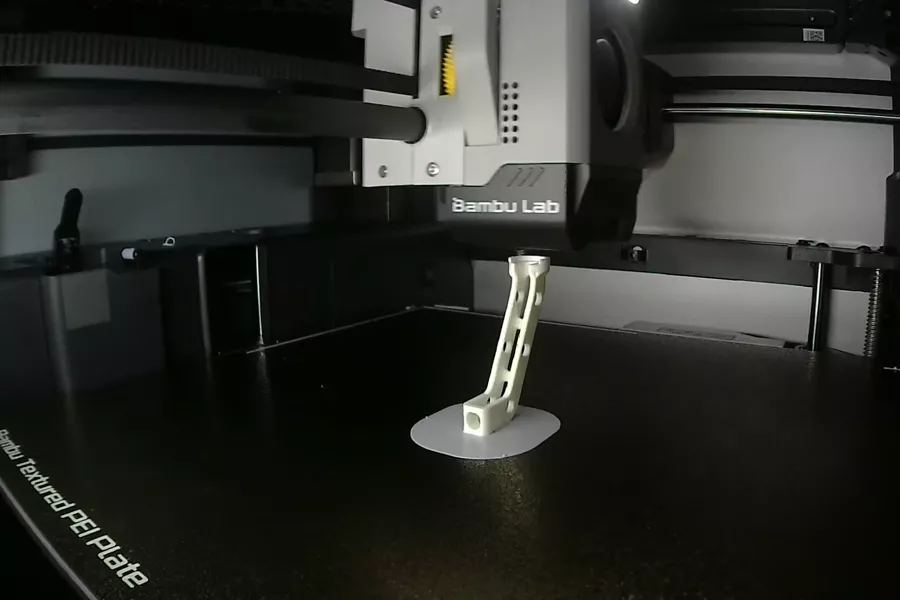
In-situ monitoring for additive manufacturing
Per-layer vision monitoring that catches print defects early on long unattended builds.
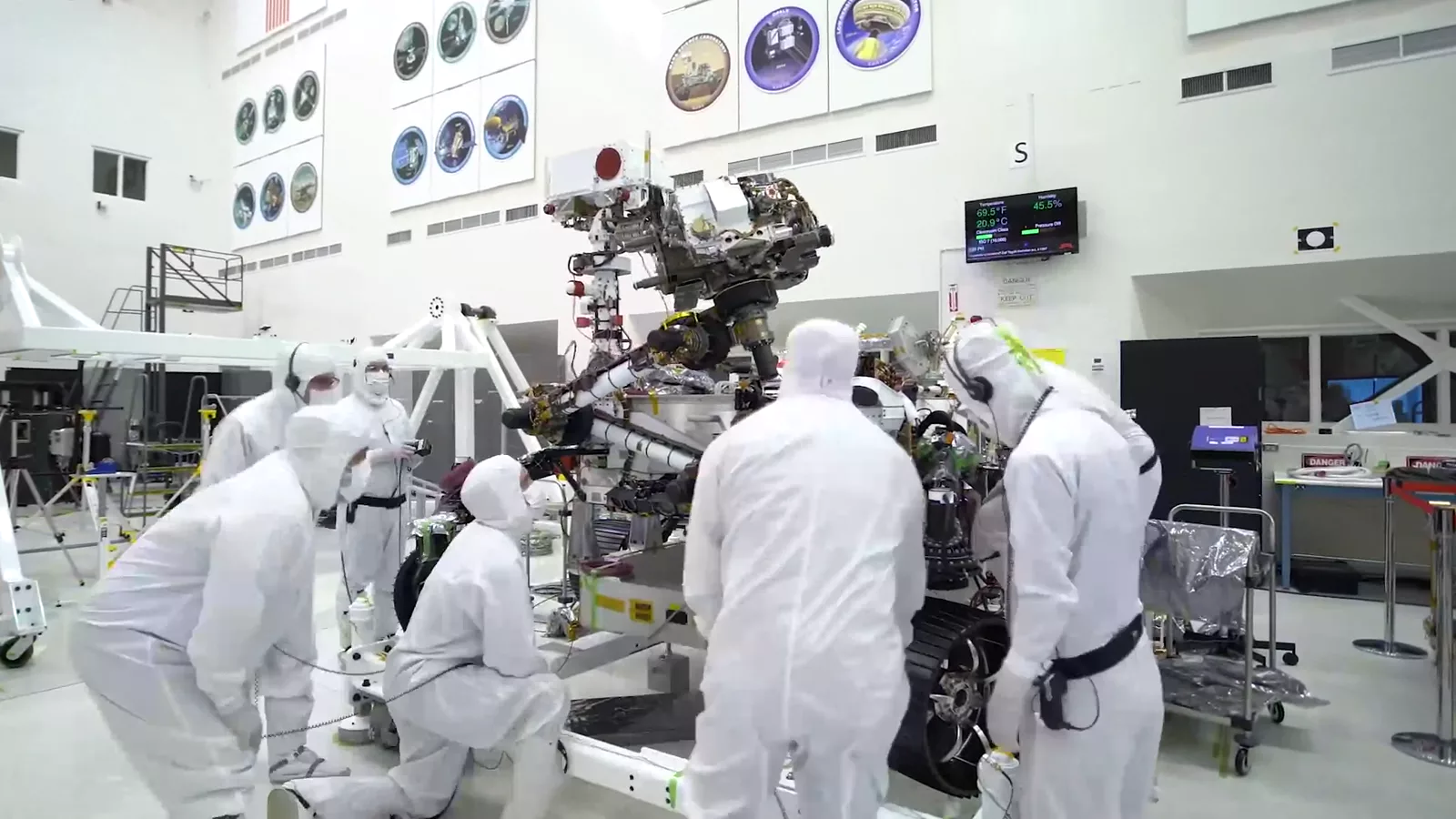
Camera-guided alignment for instrument integration
Sub-millimetre, vision-guided alignment of a robot arm to fixtures during high-value instrument build.
Field log
Frames from the floor
Stills pulled from the same footage, the kind of scene our perception and control work runs against, from line-side inspection to legged platforms in the field.


Footage credits
- Automated optical inspection on an electronics line by Inke Pickhardt / Sounds of Changes, CC BY 3.0
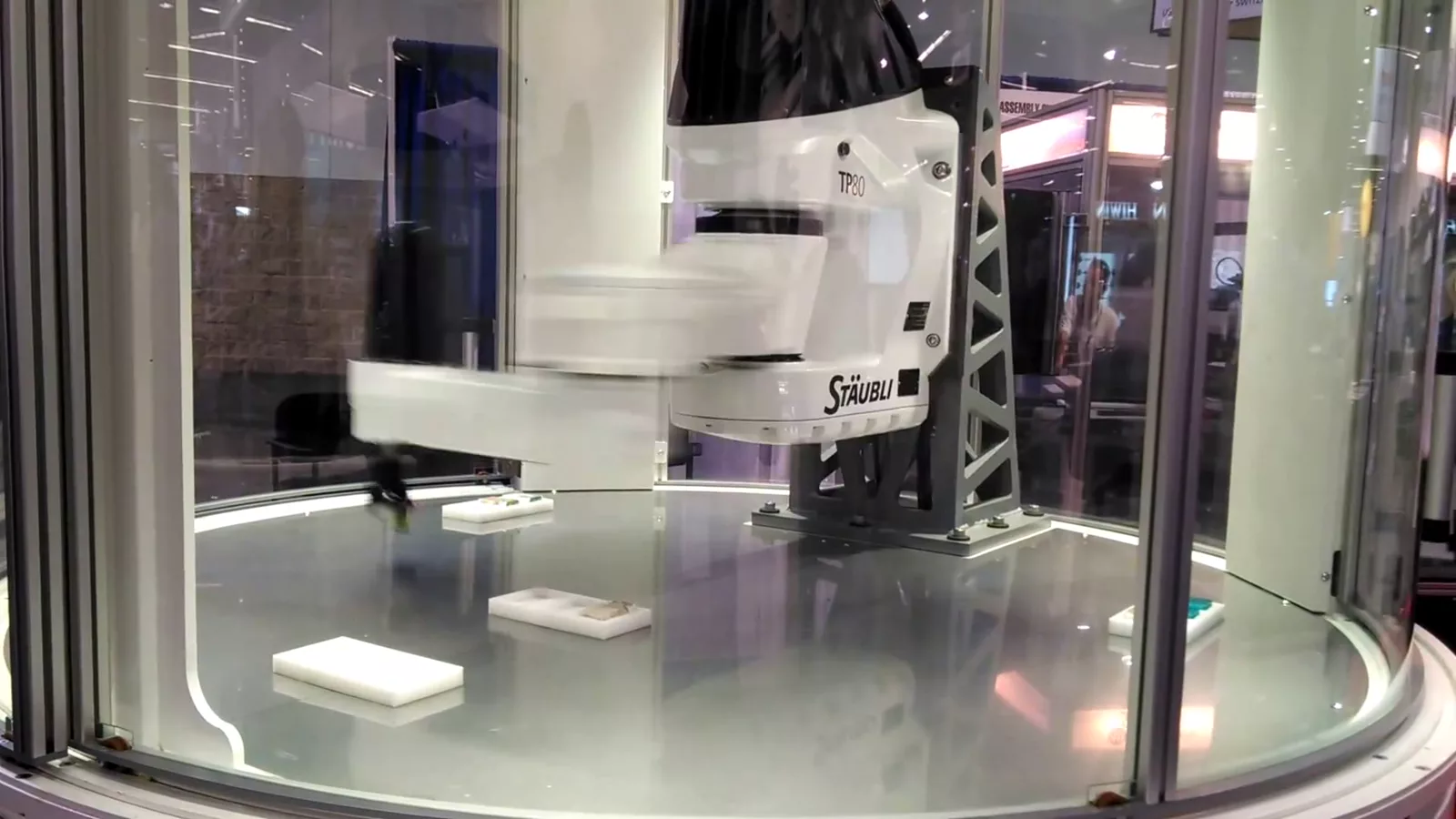
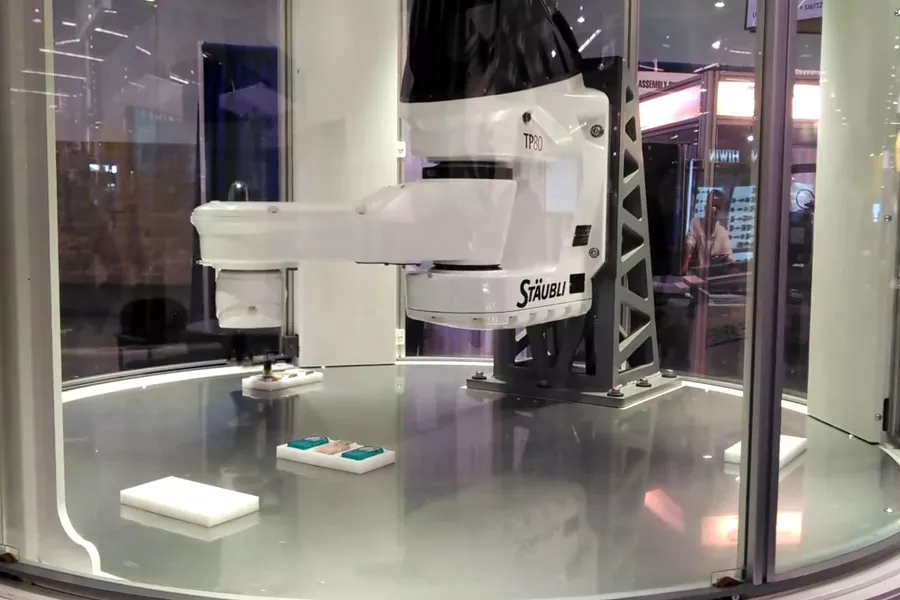
- High-speed six-axis pick-and-place cell by no_kids_for_dads, CC BY 3.0
- Legged mobile robot on rough terrain by Auledas, CC BY-SA 4.0
- Manual + machine assembly station by Inke Pickhardt / Sounds of Changes, CC BY 3.0
- Additive-manufacturing process (timelapse) by Benlisquare, CC BY-SA 4.0
- Cleanroom integration of a robotic arm by NASA/JPL-Caltech, Public domain (NASA)
All media on this site is real, license-clean footage from Wikimedia Commons, trimmed and cropped for the web. It is shown as representative of the domains we work in, not as client deployments.
Bring us the hard part
Tell us what the machine needs to see.
Share your environment, sensors, and what “good” looks like. We’ll tell you what is buildable, what is not, and where we would start.
[email protected]