Precision integration
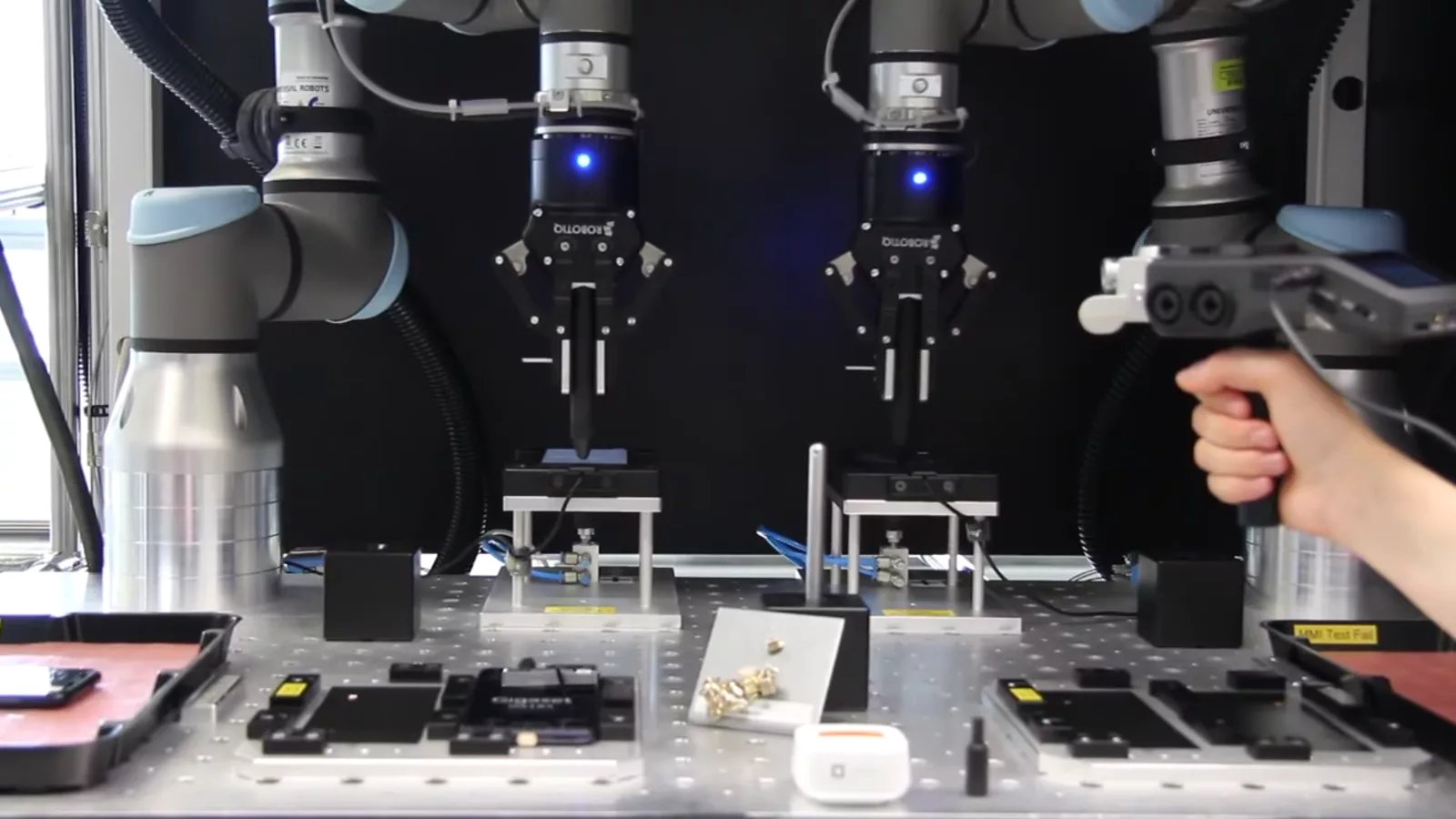
Camera-guided alignment for instrument integration
Sub-millimetre, vision-guided alignment of a robot arm to fixtures during high-value instrument build.
- ±0.1 mmalignment repeatability
- -55%alignment time
- per-unitmetrology logged
Stack
- Calibrated stereo cameras
- Fiducial markers
- Hand-eye calibration
- Visual servoing
- Six-axis arm
The problem
A precision-instrument team aligned components by hand against gauges during integration. It was slow, depended on the individual technician, and left only a written record. They wanted repeatable alignment to tight tolerance with metrology captured automatically per unit.
Approach
- 01 Calibrated a stereo pair and the arm together (hand-eye) so vision and motion shared one frame.
- 02 Estimated fixture pose from fiducials and known features on each component.
- 03 Closed the loop with visual servoing, driving the arm to target tolerance rather than to a taught point.
- 04 Recorded the measured pose at each step as the unit's integration metrology.
Outcome
Alignment that had varied with the technician became repeatable to a tight band, and the step took noticeably less time. Every unit now ships with its own alignment record. The calibration discipline, not the servoing, was where the accuracy was won or lost.