Robotic manipulation
Bin picking with 3D grasp estimation
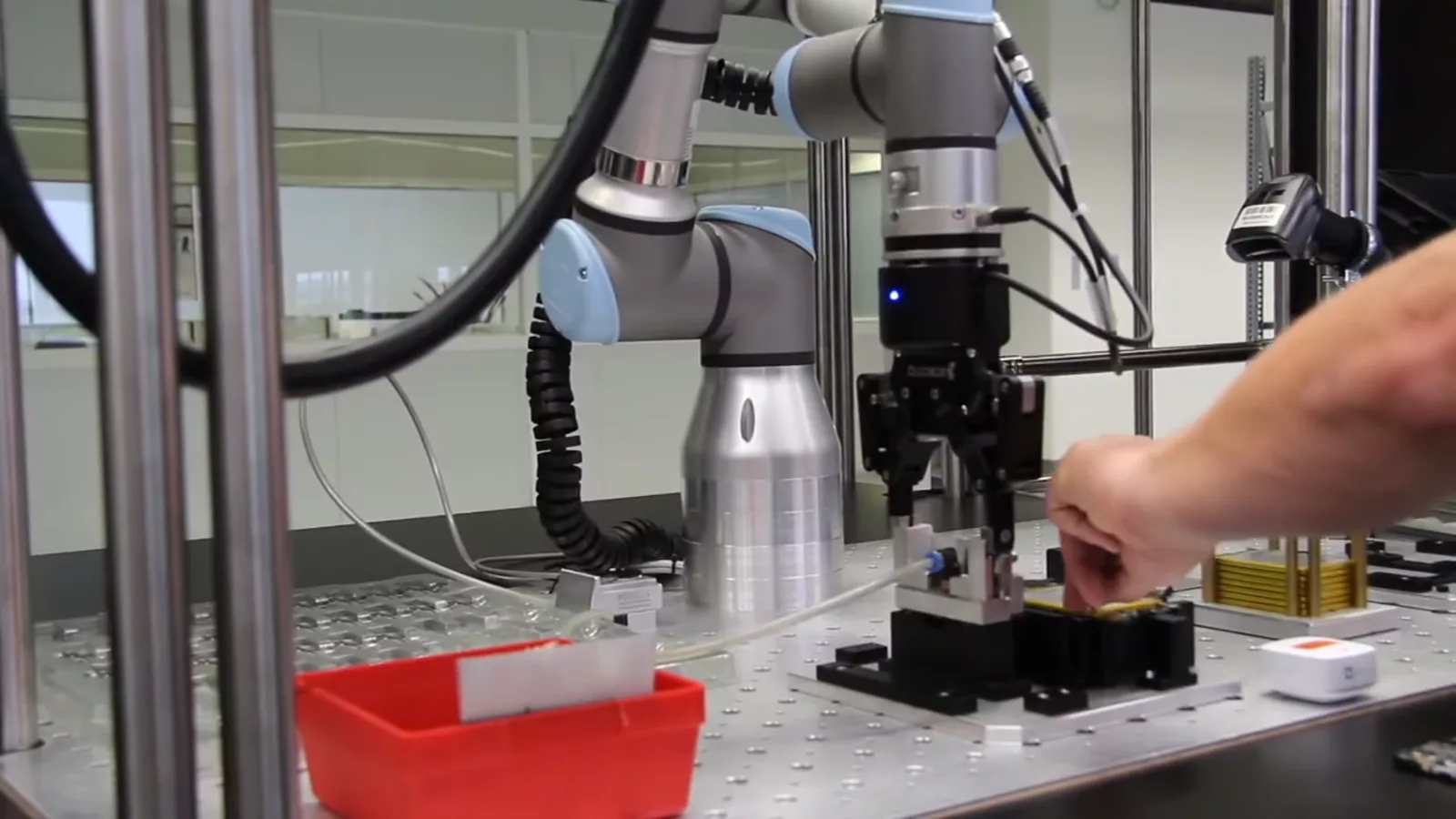
A robotic arm picking mixed metal parts from unsorted bins to tend a machining cell.
- ~97%first-attempt pick success
- ~8 scycle time per pick
- ~90%shift time unattended
Stack
- Photoneo structured-light 3D camera
- Point Cloud Library
- Learned grasp-pose estimation
- Universal Robots UR10e
- MoveIt motion planning
- Custom two-finger gripper
The problem
A contract manufacturer fed a CNC cell by hand from bins of mixed castings. The work was repetitive and hard to staff on night shifts. Parts arrived jumbled and reflective, so earlier 2D vision attempts failed on overlap and glare.
Approach
- 01 Captured bins with a structured-light 3D camera and merged frames to suppress specular dropout.
- 02 Estimated 6-DoF grasp poses from the point cloud, ranked by reachability and collision clearance.
- 03 Planned collision-free approaches for a six-axis arm with a custom two-finger gripper.
- 04 Checked each pick against a force threshold and re-imaged the bin after every cycle.
Outcome
The cell now tends itself for most of a shift. First-attempt pick success on the mixed bin reached the high nineties after gripper changes, and cycle time landed close to the manual baseline. Remaining failures were tangled parts at the bin floor, cleared by staff on a scheduled check.